Human-Robot collaboration has been shown to improve ergonomics on factory floors while allowing a higher level of flexibility in production. However, the current robot programming interfaces require domain expertise. Moreover, robots’ response for every possible event needs to be configured in advance which makes them hard to reprogram.
Therefore, more intuitive methods of programming are desirable for instance by demonstration. Such systems could allow a non-expert to intuitively program robots on-the-go, without explicitly coding each detail. This would in turn allows a user to guide the robot through a task which the robot can then repeat either through mimicry or, using more advanced algorithms to extract underlying task primitives.
Although much effort has been put towards demonstrating compelling results in the laboratory, such methods are still not widely used in industrial applications. The main challenges in this field are the automatic learning of task representations and adaptability of the learned tasks in an uncertain environment, where each task can be expressed as a series of primitive action components. Additionally, in order to facilitate the widespread use of such technologies, it is imperative to consider human factors including ergonomics, stress and comfort level but additionally legal and certification challenges.
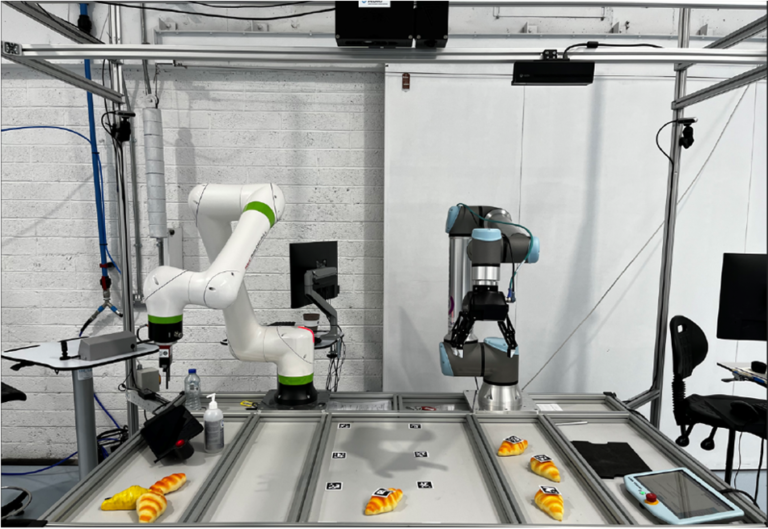
Within the Live Lab 1 environment there are two human robot collaboration stations
First, a dual arm collaborative robot cell, shown in the Figure above and secondly, a teleoperation cell shown. Each scenario is equipped with a range of human factors sensors to evaluate the effects of the robot instruction on the human user.
The objective of the Live Lab is thus two-fold:
- to explore innovative methods of robot programming
- to ensure that the developed methods are human centred and there exists a mean towards certification of such methods in the future.